车用永磁同步电机的控制策略及若干要点
永磁同步电机的原理
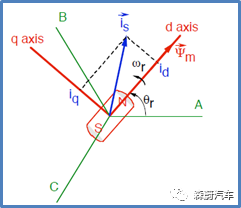
将电机的三相ABC坐标系转化为D-Q轴坐标系进行电机等效模型分析:
>>以旋转的转子位置来定义正交D-Q轴坐标系。
>>D轴固定在永磁磁链的方向。
>>所有电流、电压和磁链都可用向量的方式展示在D-Q轴坐标系中。

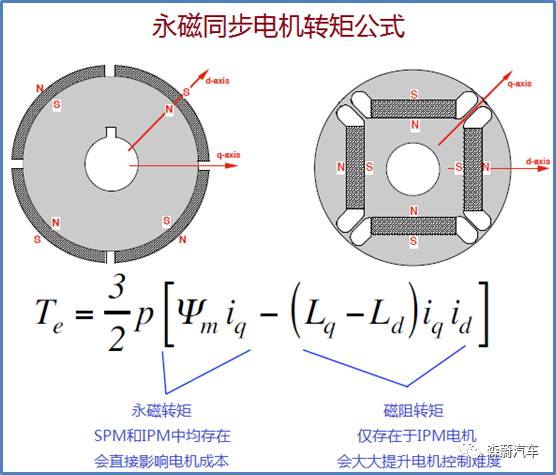
下述公式表示了永磁同步电机的转矩产生方式,分为永磁转矩和磁阻转矩两部分。
永磁同步电机的控制原理
>>永磁同步电机的控制使用矢量控制。电流控制基于转子位置。
>>控制策略为闭环控制,反馈量为三相电流和电机转子位置。
>>电压调制方式一般采用SVPWM(空间矢量脉冲宽度调制)。
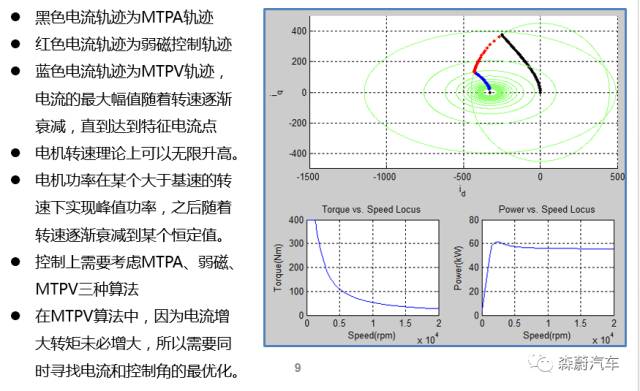
>>函数fd和fq是从转矩转化为Id和Iq指令的函数,遵照电机本身的MTPA(最大转矩电流比控制)电流轨迹而设定。
>>高速弱磁控制基于MTPA电流轨迹,进行更进一步的弱磁算法。


>>绿色电流圆代表电机/控制器系统的最大运行交流电流
>>蓝色电压椭圆代表在固定直流母线电压但不同转速下的电压限制运行区间(IPM为椭圆,SPM为圆形)
>>受限于电压条件和电流条件,电机在某个转速下,仅能运行在此转速下的电压椭圆和电流圆的相交区域,如下图粉色区间则代表了在某个高转速下的电流可运行区间。
>>椭圆的圆心为永磁磁链除以D轴电感,此数值被定义为特征电流,又被称为短路电流,在电机控制上具有重要的意义。下文就特征电流的不同分三种情况进行分析。

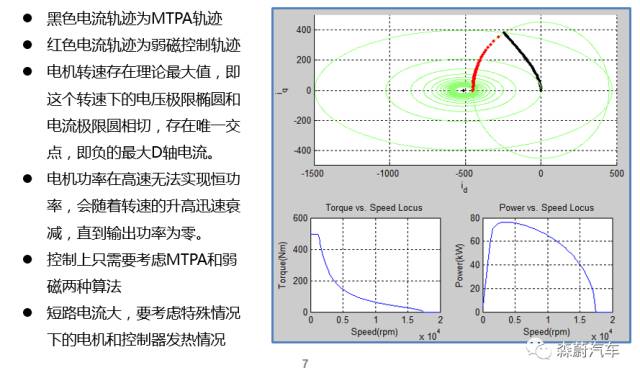
情况1:椭圆圆心(特征电流点)在电流极限圆外
情况2:椭圆圆心(特征电流点)在电流极限圆上
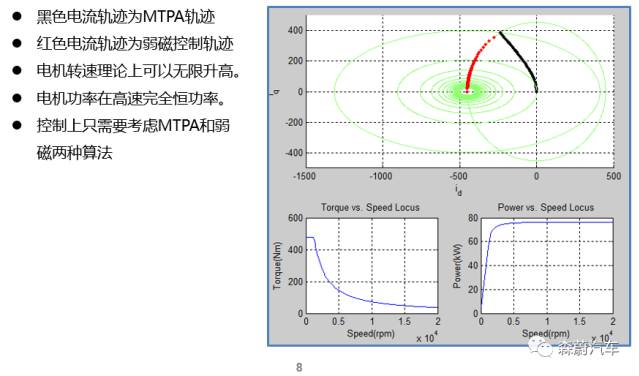
情况3:椭圆圆心(特征电流点)在电流极限圆内
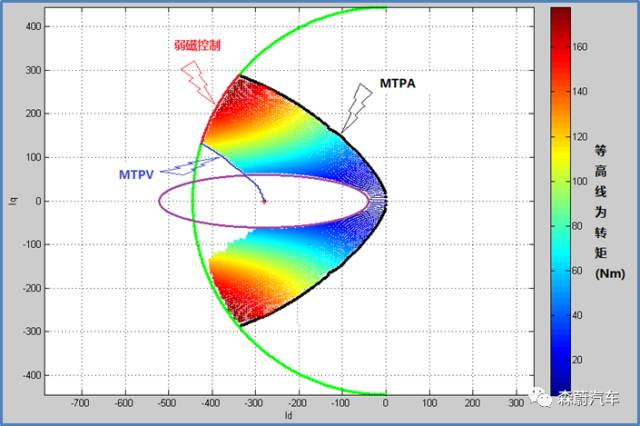
>>下图使用牟特科技一款物流车平台的电机仿真数据,在D-Q轴平面用等高线方式画出电机的等转矩曲线。
>>这款电机的电流轨迹分为三部分,存在等转矩曲线的区间即电流的可运行区间。
>>紫色电压极限椭圆代表最高转速下的电压极限椭圆。故此椭圆以内没有等转矩曲线。
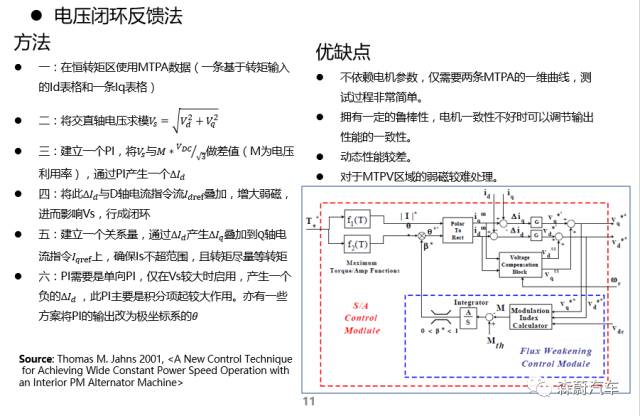
永磁同步电机的常见弱磁方法1
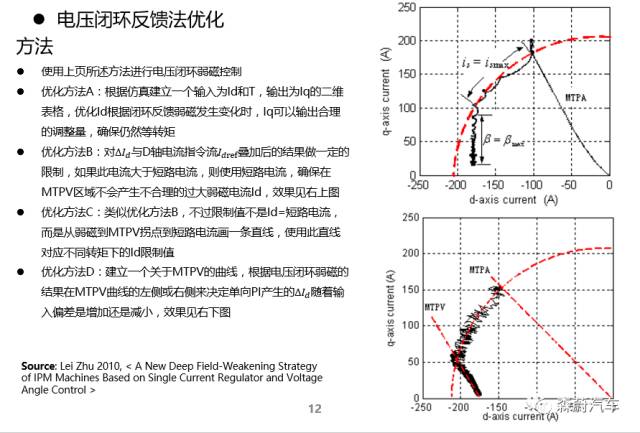
永磁同步电机的常见弱磁方法2
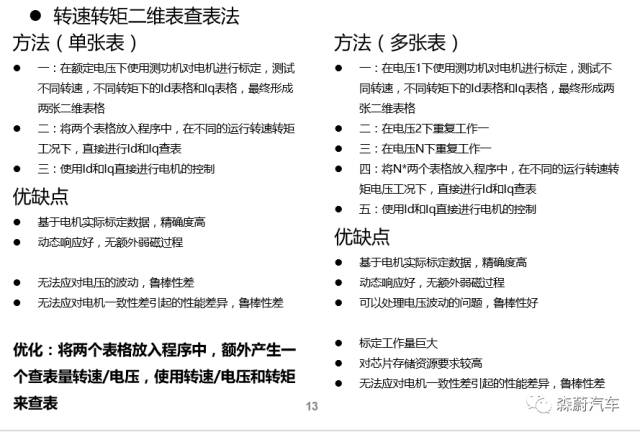
永磁同步电机的常见弱磁方法3
永磁同步电机的常见弱磁方法4
永磁同步电机的常见弱磁方法总结
结论
>>弱磁控制的核心是在有限的直流电压限制以及确定的电压利用率设定之内,尽量输出更大的转矩达到更高的转速。
>>搭配过调制算法,会在一定程度上提高系统的弱磁性能。
>>各种弱磁算法的目的是均是为了找出一个合理的Id/Iq指令组合,用于控制,实现预期的性能目标。
>>电压闭环反馈弱磁法是弱磁的基础方法,常用于初学者以及对于性能要求不高的场合。其各种优化算法可以较好的解决这一问题,并真正实现工程应用。
>>单张/多张表格查表算法,国内有较多企业使用,其中不乏第一梯队第二梯队的供应商。
>>单张表格转速/电压查表的方法,是一种性价比比较好的方法,值得推荐,国内第一梯队的供应商有使用。
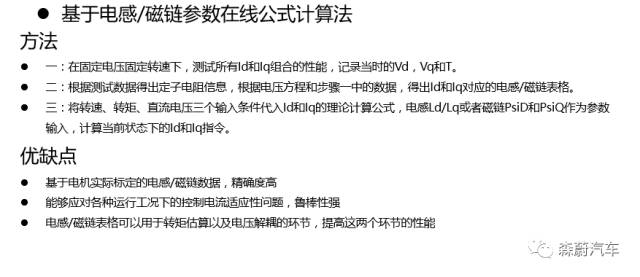
>>基于电感/磁链参数查表的算法,在部分有外企背景的供应商里面使用的较多,而且在此基础上有各种变形,以及优化。
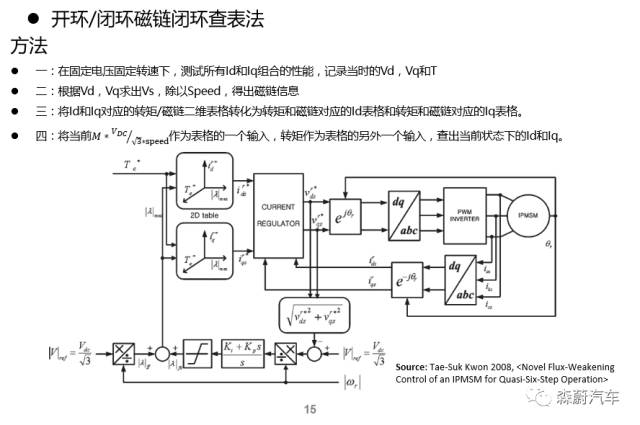
>>磁链闭环弱磁方法,在国内多个第一梯队的供应商中有使用,值得关注。
>>查表和电压闭环一般结合起来使用,弱磁动态性能和鲁棒性会更好。
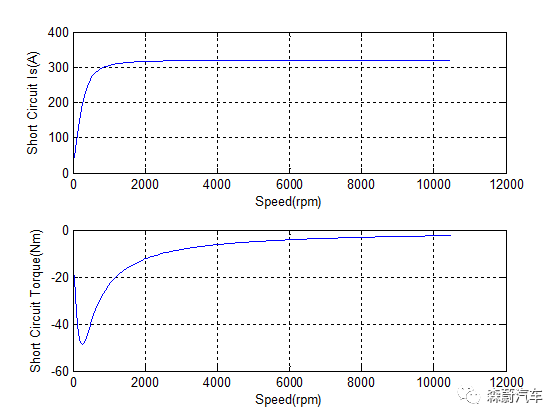
要点:特征电流
>>电机的特征电流I_ch=φ_f⁄L_d是电机控制中的一个重要参数,其会直接影响控制策略
>>特征电流即电机的短路电流,电机的短路电流即三相短路状态下电机三相绕组上产生的交流电流,用于主动三相短路策略
>>电机的短路电流特性如下图,所以在做三相短路保护时需要注意相关的短路电流特性
要点:电流ADC采样
>>FOC控制中,电流反馈需要使用ADC采样,所以对于ADC采样的精度以及同步性要求很高。
一:ADC采样要尽量和位置采样同步发生,两段程序要尽量在执行时间上靠近
二:ADC采样尽量要避开PWM切换的时间点
三:ADC采样主要采集两相用于FOC控制,另外一相用于冗余策略。
四:在芯片支持的情况下,用于FOC控制的两相要尽量双路同步采样。
五:在基础软件支持的情况下,可以考虑多次采样。譬如采集两次求均值,采集三次去掉最大去掉最小使用中间值,采集四次去掉最大去掉最小使用中间两个的平均。
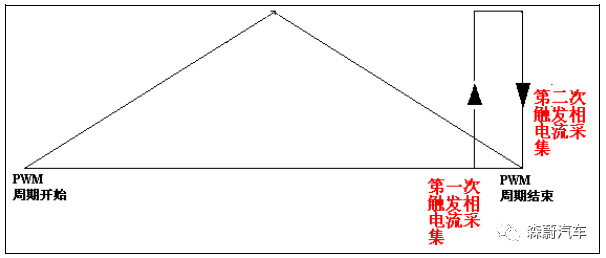
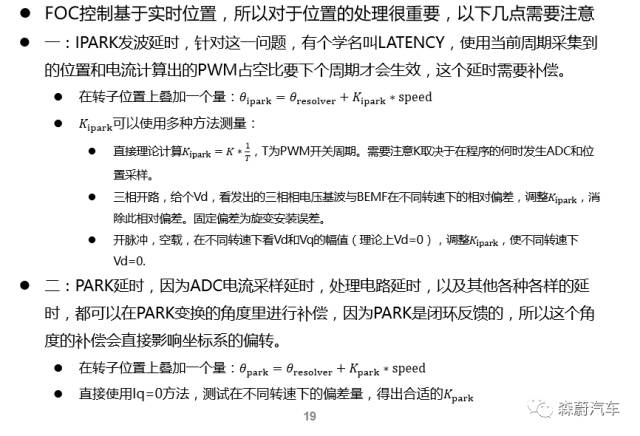
要点:位置延时
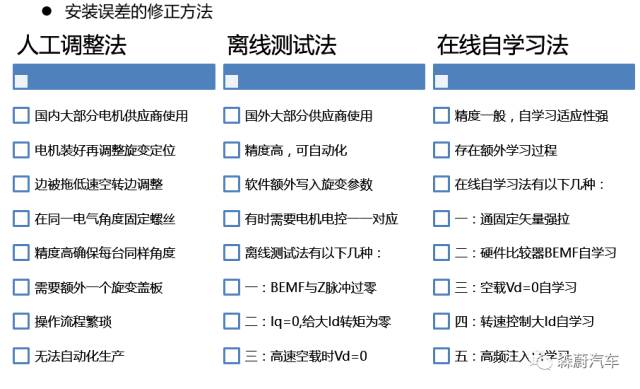
要点:旋变安装误差1/3
安装误差的定义
>>旋变是一种绝对位置传感器,当旋变转子零位转过旋变定子零位的时候,即为旋变的电气/机械零位;当永磁同步电机的转子磁铁中心线转过A相绕组的中心线的时候,即为电机的电气/机械零位;
>>由于设计上的原因(如出线,干涉,定位等),未必会将旋变的零位和电机的零位对应起来,即电机的位置为零的时候,旋变的位置会是另外一个值θ,这个θ由两部分构成,一部分为电机设计引起的固定偏差θ_fix,另外一部分为工艺精度原因引起的不固定偏差∆θ,即θ=θ_fix+∆θ。我们一般关注的是不固定偏差∆θ。
>>旋变安装误差的形成原因主要有以下几点:
旋变定子与安装端盖的定位;
电机定子与电机壳体之间的定位;
电机壳体与旋变安装端盖之间的定位;
旋变转子与电机转轴之间的定位;
电机转轴与电机转子之间的定位;
电机定子的下线方式;
旋变本身的零位公差。
要点:旋变安装误差2/3
>>安装误差的影响
>>以12米纯电动汽车的驱动电机为例,为满足典型公交车型70km/h的车速,电机在2500rpm左右的转速需要具备约70kW的功率,如果此时旋变安装误差发生了一定的偏移的情况下,电机性能会相应的降低,具体情况如下:

要点:旋变安装误差3/3

相关阅读: 消息类文章
- 折弯自动化加工设备的新方向——数控板料折边机 FB2516A2019-12-20
- 普玛宝2019工厂开放日在苏州完美收官2019-12-20
- 预见 2019:《中国 3D 打印产业全景图 谱》(附现状、2019-12-20
- 协易在TIMTOS2019上发布SEYI 智慧冲压解决2019-12-27
- 大族激光十年磨一剑20kw激光切割机在CIMT2019首发2019-12-20
- MFC 行业观察2019-12-20
声明: 本网站为冲压和钣金业内信息集合和展示平台,欢迎不同的声音和观点,为行业人士提供参考,文章并不代表MFC的观点。书面刊用本站及MFC《金属板材成形》的原创文章,必须获得MFC的书面授权;电子平台转载,则必须注明作者和出处,对于盗版、冒名和不注明出处等行为以及由此产生的负面后果,MFC保留追究的权利。
图片新闻








品牌展厅365天全天候线上展厅

推荐专题
- 一周热点
- 月点击榜
- 1【MFC推荐】激光焊接工艺有哪些?(25)
- 2金属锻造技术的起源及发展史(33)
- 3钢板表面涂油对冲压的影响及控制方法(34)
- 4 云车间——钣金共享智造工业互联网平台(37)
- 5钣金折弯圆弧展开精准计算!(50)
- 6热冲压用钢22MnB5 回火组织与性能分析(53)
- 7热镀锌钢板锌层冲压脱落的原因分析(54)
- 8钣金折弯半径跟板厚度之间的关系(图文对比)(55)
- 9国内精冲钢产品的生产现状和发展趋势(61)
- 10【MFC推荐】天生无畏 卓而不凡 I D-Tube 520重载型专业激光切管机(120)


